#아두이노 #자율주행
자동차 이름이 MCar, 만든 기간 중, 2019-10-9~2019-10-11, 만든 이유 시험 기간 중 우연히 자율주행 시험운영에 관한 뉴스를 접하면서 나도 자율주행 기능을 갖춘 자동차를 아두이노로 만들고 싶은 욕구가 생겼다.
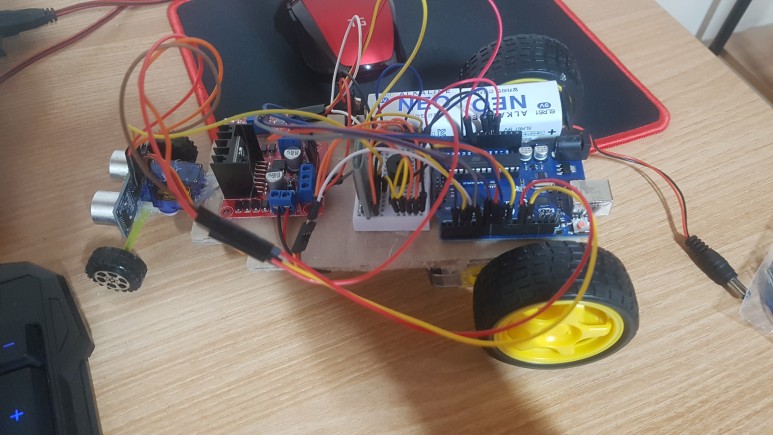
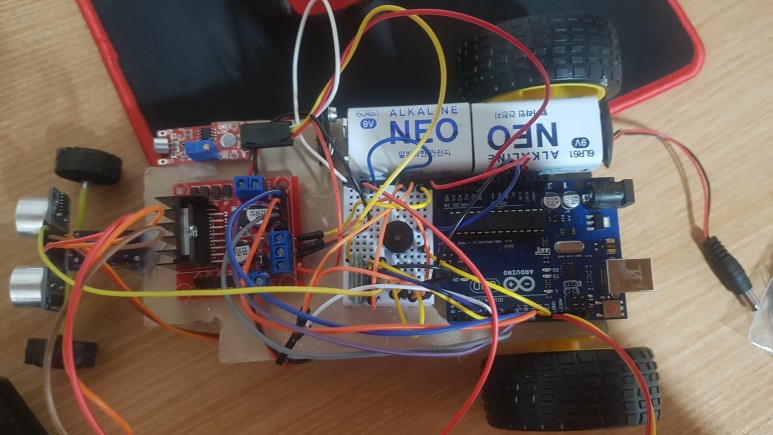
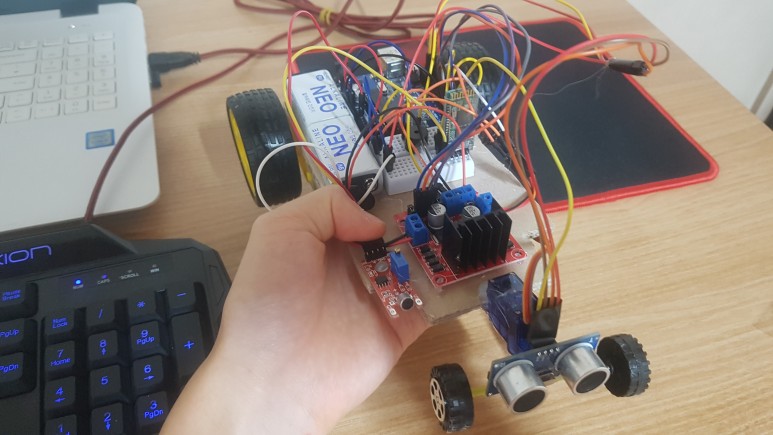
· 준비물 DC 모터 2개, 초음파 센서, 소리 센서, 9v 건전지 2개. 바퀴4개, 아두이노 UNO보드, 브레드보드, 블루투스모듈, 점퍼선20개, 드라이버, 서보모터, 빨대1개, 건전지홀더2개, 모터드라이버, 박스, 글루건, 전기테이프, 부저
• 주요기능 1. 자율주행 : 초음파센서로 거리를 인식하여 거리값이 300보다 작을 때 DC모터로 후진하여 서보모터로 좌측을 70도로 하고 초음파센서로 측정한 거리가 300보다 작을 때 다시 우측으로 120도 돌려 측정한 거리가 300보다 클 때 전지하여 이동하고 다시 장애물을 인식하여 뒤로 가서 우측, 좌측 인식하여 좌측 인식하여 측정한 거리가 300보다 클 때 다시 우측으로 120도 돌려 측정됨을 반복하여 이동함.
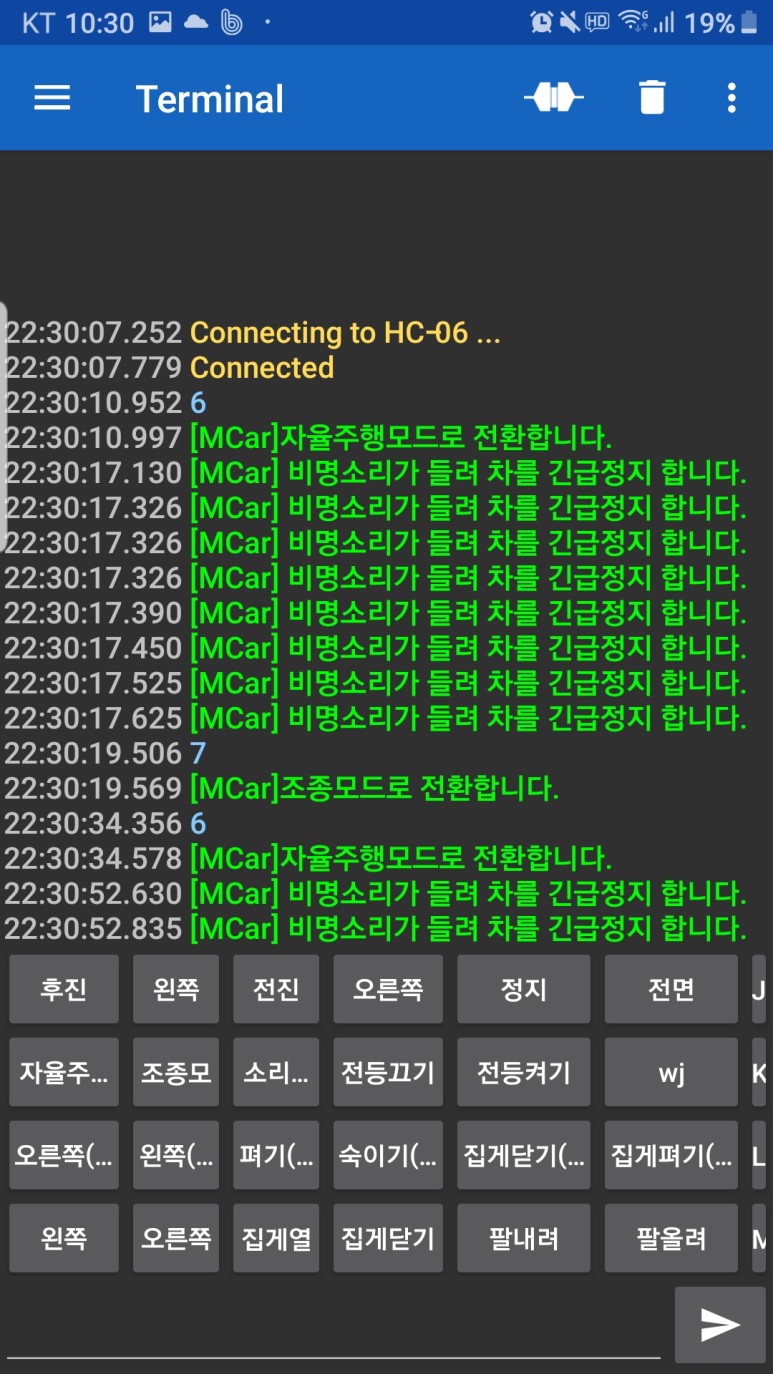
2. 비명감지 : 자율주행 중 갑자기 사람이 튀어나올 것에 대비하거나 만약 정면에 사람이 있을 때 사고를 줄이기 위한 기능이다. 예를 들어 사람이 앞에서 큰소리로 비명을 지르면 소리 센서가 그 값을 불러와 전기신호로 바꾸고 모든 시스템이 작동을 정지한다.
3. 휴대폰 컨트롤 : MCar와 휴대폰을 블루투스로 연결하면 MCar에 대한 최신 정보를 수신할 수 있다. 그리고 키 입력으로 자율주행모드->조종모드, 조종모드->자율주행모드로 전환할 수 있다. 그래서 조종 모드에서는 왼쪽, 오른쪽, 전진, 후진, 전면 방향을 다룰 수 있다. 그리고 MCar가 감지하는 알림을 받을 수 있다.
• 문제점 1. 초음파 센서가 앞에만 설치되어 뒤가 보이지 않는다. 즉, 뒤쪽 거리는 감지할 수 없기 때문에 뒤에 부딪힐 가능성이 높다.2. 앞바퀴는 DC모터가 달려 있지 않아 속도가 느린 편이다.3. 소리 센서가 내 소리를 정확히 닫지 못한다.4. 에너지를 많이 소비한다.5. 모든 휴대전화로 블루투스 접속이 가능하므로 보안이 취약하다.
· 소스코드
· 구동사진